


Semblanza
El M.T.A. Abraham de Jesús Pablo-Sotelo es Ingeniero en Robótica Industrial y Maestro en Tecnologías Avanzadas, ambos grados otorgados por el Instituto Politécnico Nacional (IPN) en México, con mención Cum Laude. Actualmente, cursa el Doctorado en Ingeniería en Sistemas Robóticos y Mecatrónicos en la misma institución.
Es miembro activo de la Aerospace and Electronic Systems Society, la Robotics and Automation Society y la IEEE Control Systems Society. Su investigación se centra en el desarrollo de sistemas de control de actitud y estabilidad para satélites tipo CubeSat, con especial énfasis en el diseño e implementación de Controladores por Rechazo Activo de Perturbaciones (ADRC).
El M.T.A. Pablo-Sotelo participa activamente en proyectos de colaboración internacional, como el proyecto BIRDS desarrollado en Kitakyushu, Japón. Ha presentado los resultados de su investigación en más de seis foros internacionales, destacando el Lean Satellite Workshop 2025 y UNISEC 2023, ambos celebrados en Tokio, Japón. Además, ha sido ponente en más de una docena de eventos académicos —tanto nacionales como internacionales— y ha publicado diversos artículos en revistas científicas arbitradas.
Formación Profesional
Doctorado en Sistemas Robóticos y Mecatrónicos (SRIM)
Unidad Profesional Interdisciplinaria en Ingeniería y Tecnologías Avanzadas, Instituto Politécnico Nacional
2025 — Presente
Título de tesis: An Active Disturbance Rejection Control-Based 3-Axis Attitude Control System with Adaptive Gains for LASERCOM in CubeSats Based on the LeanSat Philosophy
Enfoque académico: Especialización en sistemas de control y estabilidad para satélites tipo CubeSat, con énfasis en el rechazo activo de perturbaciones en modelos de control de actitud satelital.
Responsabilidades asociadas: Dirección de cuatro proyectos de tesis de licenciatura.
Maestría en Tecnologías Avanzadas
Unidad Profesional Interdisciplinaria en Ingeniería y Tecnologías Avanzadas, Instituto Politécnico Nacional
2023 — 2025
Título de tesis: Design, Development, Implementation, and Testing of a Verification Bench for Stability and Attitude Control Subsystems in 1U CubeSat Satellites
Enfoque académico: Especialización en sistemas dinámicos, con énfasis en teoría de control aplicada a metodologías de prueba para subsistemas de determinación y control de actitud en satélites tipo CubeSat.
Responsabilidades asociadas: Supervisión de dos proyectos de tesis de licenciatura y participación como Local Organising Chair en el International Conference on AeroSpace Science and Technology (ICASST).
Logros destacados: Estancia de investigación internacional de tres meses en el Kyushu Institute of Technology, Kitakyushu, Japón. Graduado con Mención honorífica Cum Laude.
Ingeniería en Robótica Industrial
Escuela Superior de Ingeniería Mecánica y Eléctrica Unidad Azcapotzalco, Instituto Politécnico Nacional
2018 — 2022
Título de tesis: Design of a Robotic Cell for Automatic Palletizing Process
Enfoque académico: Formación en modelado y control de sistemas robóticos industriales.
Logros Destacados: Egresado con mención honorífica Cum Laude como parte de la generación 2018–2022.
Abraham de Jesús Pablo Sotelo holds a Bachelor’s degree in Industrial Robotics Engineering and a Master’s degree in Advanced Technologies, both awarded by the National Polytechnic Institute (IPN) of Mexico. His academic and research work is primarily focused on the development of attitude and stability control systems for CubeSat-class satellites.
He has actively contributed to international collaborative initiatives, including the BIRDS project developed in Kitakyushu, Japan. His research places particular emphasis on the implementation and analysis of Active Disturbance Rejection Control (ADRC) strategies.
Mr. Pablo has presented his work at more than six international scientific forums, notably the LeanSatellite Workshop 2025 and UNISEC 2023, both held in Tokyo, Japan. In addition, he has participated as a speaker in over a dozen academic events at both national and international levels. His contributions include several publications in peer-reviewed and indexed scientific journals.
Líneas de Generación y Aplicación del Conocimiento
Attitude Determination and Control Systems for CubeSat systems
Desarrollo y optimización de algoritmos y técnicas de fusión sensorial para determinar la orientación de satélites en órbita terrestre baja, así como estrategias de control para lograr y mantener la estabilidad y orientación del satélite en el espacio.
Active Disturbance Rejection Control (ADRC)
Aplicación de técnicas de control por rechazo activo de perturbaciones para mejorar la robustez y el rendimiento de sistemas de control en satélites y plataformas robóticas bajo condiciones dinámicas e inciertas.
Instrumentation for Space Systems
Integración y calibración de sensores y actuadores a bordo, diseñados específicamente para misiones espaciales con satélites pequeños.
Hardware-in-the-Loop (HIL) Verification for Satellite Control Systems
Desarrollo de metodologías basadas en Hardware-in-the-Loop para la validación y pruebas en tiempo real de subsistemas de control de actitud satelital.
Adaptive Control of Robotic Systems
Modelado y control de plataformas robóticas con capacidad de ajuste de ganancias en respuesta a entornos operativos cambiantes.
Control Theory and Applications
Fundamentos teóricos y aplicaciones prácticas de los sistemas de control modernos en los dominios aeroespacial y robótico.
Investigación actual
Control por Rechazo Activo de Perturbaciones (ADRC)
El ADRC es una estrategia de control robusta que permite estimar y compensar en tiempo real perturbaciones internas y externas del sistema. Al rechazar activamente estas perturbaciones, se mejora la precisión y la capacidad de respuesta del sistema, lo cual es especialmente útil en aplicaciones robóticas con dinámicas no lineales y variables en el tiempo.
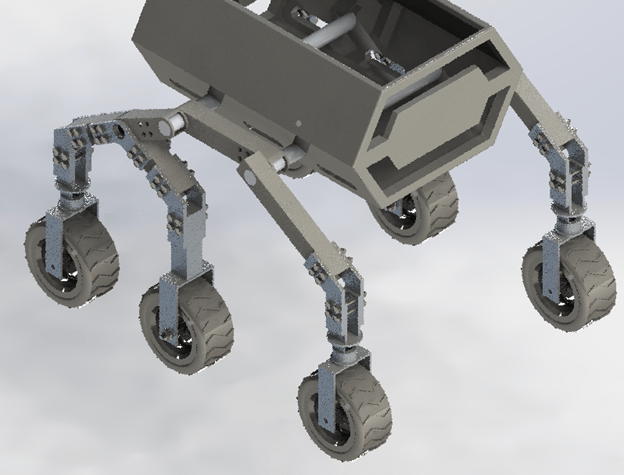
Sistemas de Control en Robótica Móvil
Los sistemas de control en robótica móvil son fundamentales para lograr una navegación precisa, estabilidad y ejecución adecuada de tareas. Estos sistemas procesan la información proveniente de los sensores y generan las señales necesarias para los actuadores, permitiendo que el robot interactúe de forma confiable con su entorno, incluso en condiciones dinámicas o inciertas.
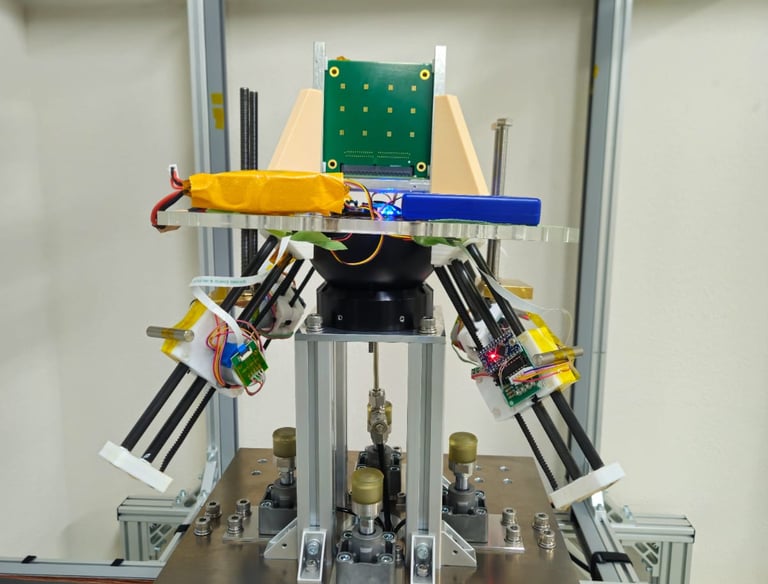
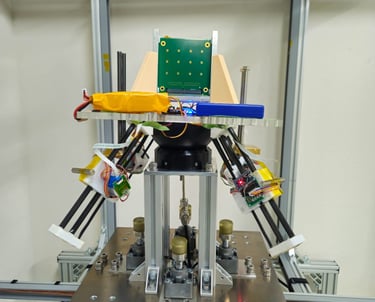
La verificación de control satelital a través de los entornos SIL (Software-in-the-Loop), PIL (Processor-in-the-Loop) y HIL (Hardware-in-the-Loop) permite validar algoritmos de determinación y control de actitud de forma progresiva, desde simulaciones puramente computacionales hasta pruebas con hardware real. Plataformas de verificación de este tipo funcionan como un banco de pruebas que simula condiciones espaciales y permite evaluar estrategias de control de orientación en un entorno seguro y controlado. De esta forma, es posible detectar errores, optimizar el desempeño del sistema y aumentar la confiabilidad antes de su implementación en misiones espaciales reales.
Verificación de Técnicas Control Satelital mediante validaciones SIL, PIL y HIL
Productividad Científica
Artículos publicados en revistas indizadas y arbitradas
“On Topology Optimisation Methods and Additive Manufacture for Satellite Structures: A Review”
Arturo Hurtado, Abraham De Jesús Pablo-Sotelo, Fabián Ramírez López, J.J. Hernández Gómez, Miguel Félix Mata-Rivera.
Aerospace, 10(12), 1025.
ISSN: 2226-4310
DOI: 10.3390/aerospace10121025
Suiza, (2023)
Artículos en Memorias de Congresos Internacionales Arbitrados
“An Extended Linearisation Approach to Nonlinear Control of Rover Lateral Dynamics”
Abraham de Jesús Pablo-Sotelo, Mauricio Ramírez-Luna, Jesús Daniel Avila-Gutiérrez, Abigail Olvera-Alvarado, J. J. Hernández-Gómez.
Journal of Physics: Conference Series, 2946, 012002.
ISSN: 1742-6596
DOI: 10.1088/1742-6596/2946/1/012002
Reino Unido, (2025)“A Hybrid Fuzzy-PID Approach for Self-Balancing in Attitude Determination and Control Systems testbeds”
Abraham de Jesús Pablo-Sotelo, Alberto Luviano Juárez, J. J. Hernández-Gómez.
Journal of Physics: Conference Series, 2946, 012003.
ISSN: 1742-6596
DOI: 10.1088/1742-6596/2946/1/012003
Reino Unido, (2025)“Iterative design of satellite structures and topology optimisation methods”
Arturo Hurtado, Abraham De Jesús Pablo-Sotelo, Fabián Ramírez López, J.J. Hernández-Gómez, M.F Mata-Rivera.
Journal of Physics: Conference Series, 2804(1), 012001.
ISSN: 1742-6596
DOI: 10.1088/1742-6596/2804/1/012001
Reino Unido, (2024)“Fuzzy Control of a Self-Balancing System: An approach for Satellite Attitude Determination and Control System testbed”
A. de J. Pablo-Sotelo, M. E. Aguilar-Jáuregui, A. Luviano Juárez, C. Peredo-Macías, J. J. Hernández Gómez.
Research in Computing Science
ISSN: 1870-4069
México, (2024)“Euler-Lagrange model for balance system of a Testing Bench for Satellite Attitude Determination and Control Systems for 1U CubeSat”
A. de J. Pablo-Sotelo, N. B. Lozada-Castillo, A. Luviano-Juárez, J.J. Hernández-Gómez.
Memorias del Congreso Nacional de Control Automático 2024, 7(1), 97-101.
ISSN: 2594-2492
DOI: 10.58571/CNCA.AMCA.2024.017
México, (2024)“Modelling a Variable Mass Pendulum System”
G. García-Luciano, C. Hernandez Soto, A. de J. Pablo-Sotelo, J.J. Hernández-Gómez.
Memorias del Congreso Nacional de Control Automático 2024, 7(1), 156-160.
ISSN: 2594-2492
DOI: 10.58571/CNCA.AMCA.2024.027
México, (2024)
Participación en Proyectos de Investigación
“Diseño de algoritmo de distribución de datos de carga útil en estaciones terrenas a alta frecuencia”
Participante. SIP 20240894.
Proyectos de Investigación Científica y Desarrollo Tecnológico, Secretaría de Investigación y Posgrado, IPN (2024)“Desarrollo e implementación de un método para el diseño y la obtención de estructuras de aplicación aeroespacial mediante optimización topológica multi-objetivo basado en algoritmos evolutivos (genéticos)”
Participante. SIP 20231067.
Proyectos de Desarrollo Tecnológico o Innovación en el IPN, Secretaría de Investigación y Posgrado, IPN (2023)“Desarrollo e implementación de un proceso de control de flujo de paquetes en enlaces ópticos satelitales”
Participante. SIP 20232774.
Proyectos de Investigación Científica y Desarrollo Tecnológico, Secretaría de Investigación y Posgrado, IPN (2023)“Desarrollo e implementación de un método para el diseño y la obtención de estructuras de aplicación aeroespacial mediante optimización topológica multi-objetivo basado en algoritmos evolutivos (genéticos)”
Participante. SIP 20226936.
Proyectos de Desarrollo Tecnológico o Innovación en el IPN, Secretaría de Investigación y Posgrado, IPN (2022)“Desarrollar e implementar un algoritmo paralelo en OpenMP para detección de texturas en imágenes de carga satelital”
Alumno Becario. SIP 20220176.
Proyectos de Investigación Científica y Desarrollo Tecnológico, Secretaría de Investigación y Posgrado, IPN (2022)
Formación de Capital Humano de Alta Especialidad
Licenciatura
César Armando Herrera López
Tesis curricular (En proceso)
Disertación: “Diseño e implementación de sistema mecatrónico para orientación de carga útil de satélites tipo CubeSat”
Ingeniería Mecatrónica, UPIITA, IPN (2024)Carlos Enrique Mejía López
Tesis curricular (En proceso)
Disertación: “Diseño e implementación de sistema mecatrónico para orientación de carga útil de satélites tipo CubeSat”
Ingeniería Mecatrónica, UPIITA, IPN (2024)Juan Carlos Vázquez Castillo
Tesis curricular (En proceso)
Disertación: “Diseño e implementación de sistema mecatrónico para orientación de carga útil de satélites tipo CubeSat”
Ingeniería Mecatrónica, UPIITA, IPN (2024)Jesús Daniel Ávila Gutiérrez
Tesis curricular (En proceso)
Disertación: “Por definir”
Ingeniería Mecatrónica, UPIITA, IPN (2025)Abigail Olvera Alvarado
Tesis curricular (En proceso)
Disertación: “Por definir”
Ingeniería Mecatrónica, UPIITA, IPN (2025)Mauricio Ramírez Luna
Tesis curricular (En proceso)
Disertación: “Por definir”
Ingeniería Mecatrónica, UPIITA, IPN (2024)Britany Naomi Avilés Pinto
Tesis curricular (En proceso)
Disertación: “Por definir”
Ingeniería Mecatrónica, UPIITA, IPN (2025)Leonardo Hernández Carbajal
Tesis curricular (En proceso)
Disertación: “Por definir”
Ingeniería Mecatrónica, UPIITA, IPN (2025)José Rodrigo Ibarra Santillán
Tesis curricular (En proceso)
Disertación: “Por definir”
Ingeniería Mecatrónica, UPIITA, IPN (2025)Kevin Missael Espinoza Solis
Tesis curricular (En proceso)
Disertación: “Por definir”
Ingeniería Mecatrónica, UPIITA, IPN (2025)Rogelio Lara Olvera
Tesis curricular (En proceso)
Disertación: “Por definir”
Ingeniería Mecatrónica, UPIITA, IPN (2025)Julio David Torres García
Tesis curricular (En proceso)
Disertación: “Por definir”
Ingeniería Mecatrónica, UPIITA, IPN (2025)Fernando Valle Pérez
Tesis curricular (En proceso)
Disertación: “Por definir”
Ingeniería Mecatrónica, UPIITA, IPN (2025)


