

División de Sistemas Telemáticos Inteligentes
Somos un grupo dedicado al desarrollo e implementación de sistemas telemáticos. Nuestro trabajo abarca desde el diseño de infraestructuras de comunicación (terrestres, satelitales e inalámbricas) y sistemas de cómputo a bordo, hasta la optimización de redes, el desarrollo de hardware de comunicaciones (antenas, módulos, entre otros), así como la simulación de tecnologías de transmisión de datos y el diseño de simuladores y herramientas de cálculo de parámetros para sistemas de transmisión.
Historia de la división
A inicios del 2024, la UPIITA dió nacimiento al proyecto del Laboratorio Transdisciplinario. Desde entonces, con la colaboración del Dr. Hernández, la M. en C. Yáñez Casas impulsó la iniciativa de integrar sistemas telemáticos inteligentes e integrales al desarrollo de la tecnología espacial en México.
Muy pronto, el laboratorio se convirtió en un centro nucleador para la renovación del concepto de telemática, no solo retomando su estructura fundacional, sino enriqueciendo su visión desde los linderos de las fronteras del desarrollo tecnológico, i.e. integrando tecnología de vanguardia como las comunicaciones cuánticas, la I. A. en los sistemas de telecomunicaciones, entre otros. Este esfuerzo dio vida a la División de Sistemas Telemáticos Inteligentes, un grupo enfocado en integrar y evolucionar los sistemas de comunicaciones tradicionales hacia un enfoque transdisciplinar de alta tecnología telemática.
Con sede en la UPIITA del Instituto Politécnico Nacional (IPN), el equipo consolidó su identidad y misión el 01 de agosto de 2025, al inicio del semestre B25, marcando el inicio formal de sus actividades, con la integración de un nutrido grupo de estudiantes de Ingeniería Telemática, Ingeniería en Sistemas Computacionales e Ingeniería en Comunicaciones y Electrónica. En mayo de 2026, se integra M. A. Ceja de Luna como sublider de la División.
Nuestra identidad
La transición fluida entre el brazo robótico, el satélite y el actuador tipo gripper simboliza la versatilidad y fortaleza del equipo para el desarrollo de sistemas espaciales en múltiples áreas, con un enfoque claro en el control y exploración espacial.
El robot de cinco grados de libertad representa la esencia tangible de la robótica, acercando su complejidad tecnológica a la comunidad y mostrando de forma clara el puente entre la investigación y su aplicación real.
La superficie lunar, aunque fuera del alcance físico, simboliza la innovación en robótica aplicada al estudio de las ciencias terrestres, reflejando nuestra capacidad para explorar y comprender entornos complejos.
Las estrellas reflejan los sueños de cada integrante, brillando como faros que nos guían y nos inspiran a convertir cada proyecto en una realidad tangible.
El transceptor del robot móvil simboliza la tecnología de telecomunicaciones, hilo vital que conecta y guía a cualquier sistema móvil, siendo esencial para el éxito de cada misión espacial.
El mecanismo del Rover, conformado por su sistema de movimiento, llantas y eslabones de soporte, representa los cimientos flexibles que sustentan todo nuestro desarrollo, simbolizando nuestra capacidad de adaptarnos a los cambios. Aunque no siempre sean visibles, estos cimientos sostienen cada proyecto y que nos permiten avanzar sin límites.
Líderes del equipo de Sistemas Telemáticos Inteligentes
👨💻 Introducción:
La M. en C. Gabriela Aurora Yáñez Casas obtuvo el título de Ingeniera en Telemática por el Instituto Politécnico Nacional (IPN) en 2013 y la Maestría en Ciencias en Ingeniería de Telecomunicaciones por la misma institución en 2021, con una tesis enfocada en herramientas numéricas para modelado de propagación electromagnética. Actualmente es profesora-investigadora en la Unidad Profesional Interdisciplinaria en Ingeniería y Tecnologías Avanzadas (UPIITA) del IPN, donde imparte asignaturas como Sistemas Distribuidos, Bases de Datos Distribuidas, Ingeniería Web, Redes de Telecomunicaciones, Redes Inteligentes, Transmisión de datos, Sistemas celulares, Metodología de la Investigación, Proyecto Terminal I y Proyecto Terminal II. Ha presentado los resultados de su investigación en más de 40 congresos nacionales e internacionales y ha coautorado más de 15 publicaciones indexadas y arbitradas. Ha dirigido 3 proyectos de investigación y ha participado en más de 20 proyectos adicionales. Ha asesorado numerosas tesis, incluyendo trabajos en cómputo a bordo satelital, comunicaciones LoRaWAN, enlaces ópticos y sistemas embebidos. Sus líneas de aplicación del conocimiento abarcan desde el diseño de sistemas electrónicos, procesamiento de señales y comunicaciones, hasta inteligencia artificial, ciencia de datos y modelado de sistemas dinámicos.
🤖 Experiencia:
Redes LPWAN e IoT.
Comunicaciones satelitales RF y FSO.
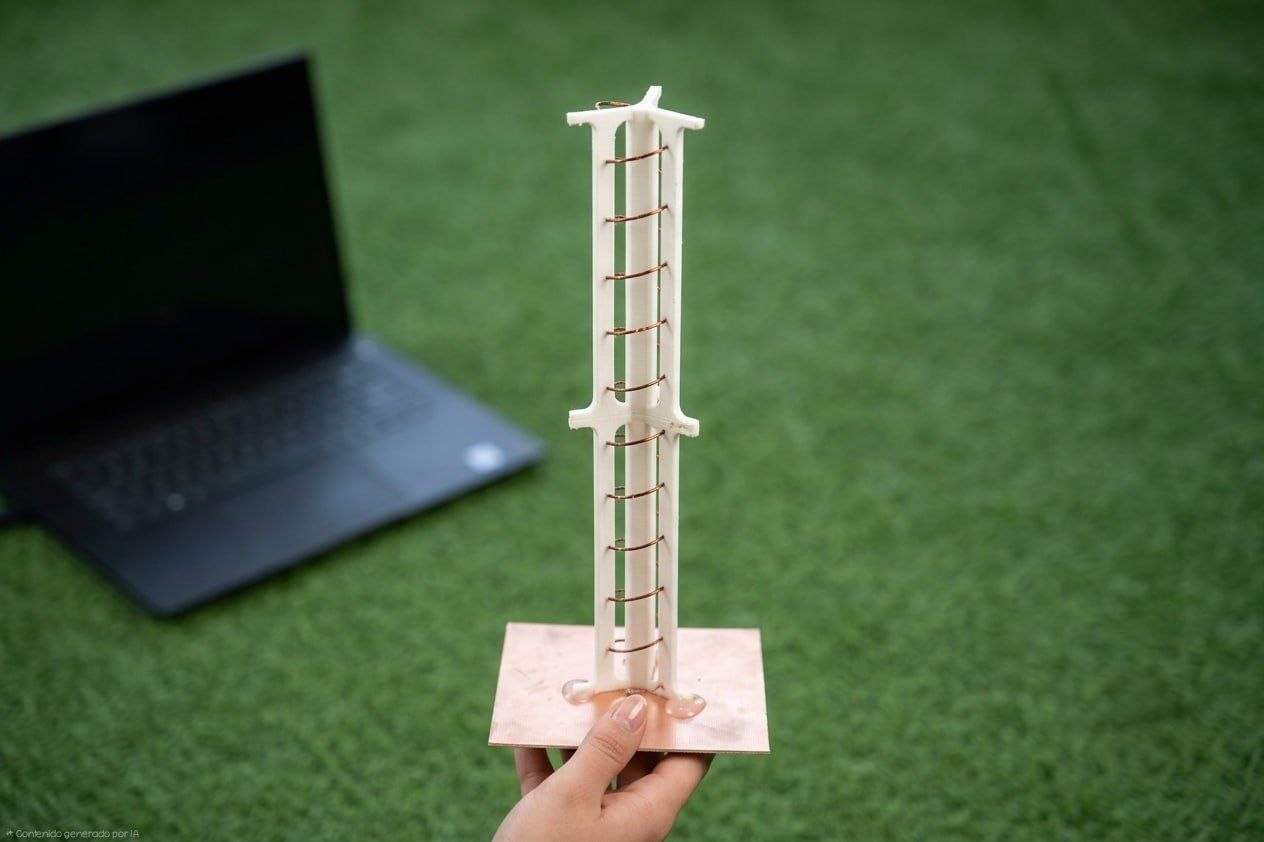
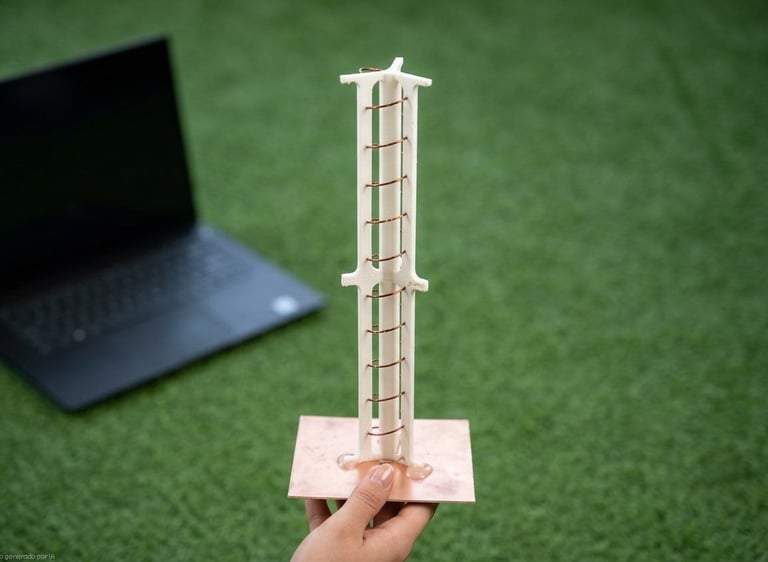
Diseño de empaquetamiento/entramado especializado para payload satelital.
Comunicaciones celulares.
Desarrollo de software especializado para comunicaciones.
Estudios y análisis mediante variable aleatoria.
Simulación por eventos discretos.
🧪 Fundación de la División
La M. en C. impulsó la conformación del equipo desde la creación del Laboratorio Transdisciplinario en 2024. Posteriormente, en agosto de 2025, derivado de la integración de más de 10 estudiantes para desarrollar proyectos terminales, en colaboración con el Dr. Jorge Hernández, marcó el inicio formal de la División de Sistemas Telemáticos Inteligentes.
M. en C. Gabriela Aurora Yáñez Casas
Manuel Andrés Ceja de Luna


👨💻 Introducción:
Manuel Andres Ceja de Luna, estudiante de Ingeniería en Telemática por el Instituto Politécnico Nacional (IPN), actualmente se encuentra desarrollando su tesis en el diseño de un prototipo de una computadora a bordo satelital basada en arquitecturas electrónicas de bajo costo para nanosatélites CubeSat de una unidad. Es un gran apasionado por la electrónica y las comunicaciones, y futuro estudiante de posgrado en Ciencias de la Computación
🤖 Experiencia:
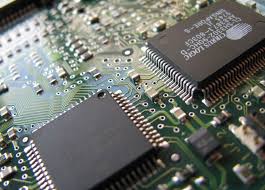
Electrónica SMD.
Cómputo a bordo satelital.
Desarrollo de antenas de alta ganancia.
Acondicionamiento de transceptores.
Diseño de empaquetamiento/entramado especializado para payload satelital.
Diseño e implementación de estaciones terrenas.
Desarrollador del sistema de telemetría/telecomunicaciones de satélite CanSat en el World Cansat Contest 2026.
Es líder de la División de Sistemas Telemáticos Inteligentes, y además, labora en el Sistema de Transporte Colectivo (STC) Metro de la CDMX en el sistema de radiocomunicaciones TETRA.
🛠️ Proyectos y Trabajos que Ofrecemos
📡 Estaciones terrenas de telecomunicaciones
Desarrollo de estaciones terrenas para comunicaciones satelitales.
Estaciones terrenas fijas y móviles para conversión y convergencia lógica de distintas tecnologías en telecom.
Desarrollo de antenas para comunicaciones en distintas bandas.
Estaciones terrenas con componentes COTS.
💻 Cómputo a bordo satelital
Desarrollo de prototipos de cómputo a bordo satelital.
Miniaturización tecnológica con componentes SMD.
Técnicas de distribución de datos en cómputo a bordo satelital.
Arquitecturas de cómputo a bordo homogéneas y heterogéneas.
I. A. en cómputo espacial
Miembros Activos
Paloma Alonso Gutiérrez
Maestra en Ciencias en Ingeniería de Telecomunicaciones, ESIME Zacatenco, IPN
Ángel Gutiérrez Aguilar
Ingeniero Telemático, UPIITA, IPN
David Eduardo Rodríguez Miranda
Ingeniero Telemático, UPIITA, IPN
Alberto Ruán Aldana
Ingeniero Telemático, UPIITA, IPN
Mauricio Raziel Soriano Laguna
Ingeniero Telemático, UPIITA, IPN
Omar Stankewech Marta Olvera
Ingeniero Telemático, UPIITA, IPN
Marco Antonio Martínez Anaya
Ingeniero Telemático, UPIITA, IPN
Edward Gerardo Cruz Luna
Ingeniero Telemático, UPIITA, IPN
Jesua Chávez García
Ingeniero Telemático, UPIITA, IPN
Daniela Hernández Nazli
Ingeniero Telemático, UPIITA, IPN
Luis Fernando Guzman Barriga
Ingeniero Telemático, UPIITA, IPN
Mariana Salazar Almanza
Ingeniero Telemático, UPIITA, IPN
Kevin Antonio Ahumanda González
Ingeniero Telemático, UPIITA, IPN
Omar Noe Trujillo Martinez
Ingeniero Telemático, UPIITA, IPN
Juan Manuel Bautista Uribe
Ingeniero Telemático, UPIITA, IPN
Lesly Esperanza Ramírez García
Ingeniero en Comunicaciones y Electrónica, ESIME Zacatenco, IPN
Lizzete Santos Ruíz
Ingeniero en Comunicaciones y Electrónica, ESIME Zacatenco, IPN
Joel Moreno Gaspar
Ingeniero Telemático, UPIITA, IPN
Jose Angel Perez Romero
Ingeniero Telemático, UPIITA, IPN
Jesús Javier Pérez Guerrero
Ingeniero Telemático, UPIITA, IPN
Sebastián Rivera Santa Cruz
Maestro en Ciencias de la Computación, CIC, IPN
Luis Fernando Fragoso
Ingeniero Telemático, UPIITA, IPN
Alfredo Sánchez Martínez
Ingeniero en Sistemas Computacionales, ESCOM, IPN
Rebeca Domínguez Arana
Ingeniero en Sistemas Computacionales, ESCOM, IPN
Keb Sebastian Fernandez Guerrero
Ingeniero Telemático, UPIITA, IPN
Arturo Cruz Aparicio
Ingeniero Telemático, UPIITA, IPN
Jorge Javier Hernández Gómez
Físico, Laboratorio Transdisciplinario