

Space Robotics Team
We are a group dedicated to the development of robotic technologies applied to the space field. Our work ranges from mobile robots and satellite control systems to intelligent solutions that drive research and innovation in Mexico.
Team history
In early 2024, the Transdisciplinary Laboratory opened its doors as a joint effort between Professor Gabriela Aurora Yáñez Casas and Dr. Jorge Hernández. Since then, with the collaboration of Dr. Hernández, the M. T. A. promoted the initiative to develop space technology in Mexico, placing robotics at the center of innovation.
The laboratory quickly became a space for creation and experimentation, addressing projects ranging from mobile robotic systems for exploration to robots specialized in satellite control. This effort gave rise to the Space Robotics Team, a group focused on transforming research into real technological solutions for space exploration.
Based at UPIITA of the National Polytechnic Institute (IPN), the team consolidated its identity and mission on August 29, 2025, at the beginning of the B25 semester, marking the formal start of its activities. Since then, the team has positioned itself as a benchmark in innovation, development, and collaboration in space robotics in Mexico.


Our identity
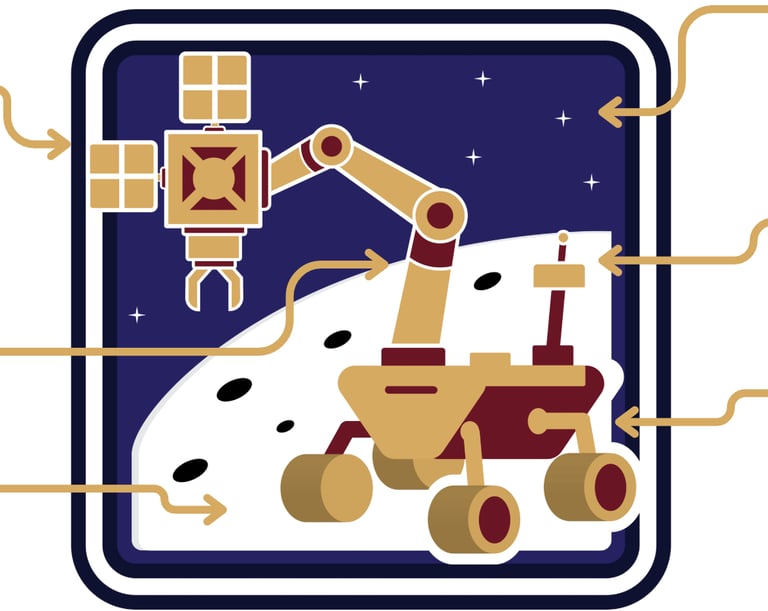
The seamless transition between the robotic arm, the satellite, and the gripper-type actuator symbolizes the team's versatility and strength in developing space systems across multiple areas, with a clear focus on space control and exploration.
The five-degree-of-freedom robot represents the tangible essence of robotics, bringing its technological complexity closer to the community and clearly showing the bridge between research and its real-world application.
The lunar surface, although physically out of reach, symbolizes innovation in robotics applied to the study of earth sciences, reflecting our capacity to explore and understand complex environments.
The stars reflect the dreams of each member, shining like beacons that guide us and inspire us to turn every project into a tangible reality.
The transceiver of the mobile robot symbolizes telecommunications technology, the vital thread that connects and guides any mobile system, being essential for the success of each space mission.
The Rover's mechanism, consisting of its movement system, wheels, and support links, represents the flexible foundations that underpin all our development, symbolizing our ability to adapt to change. Although not always visible, these foundations support every project and allow us to move forward without limits.
Leaders of the Space Robotics Team
👨💻 Introduction:
Abraham de Jesús Pablo-Sotelo, Industrial Robotics Engineer and Master's in Advanced Technologies from the National Polytechnic Institute (IPN), graduating with honors (Cum Laude) in both degrees. Currently pursuing a PhD in Robotic and Mechatronic Systems Engineering at the same institution.
🤖 Experience:
Mobile robotics.
Development of robotic systems in ROS2 and SLAM technique.
Programming of ABB, KUKA, and FANUC industrial robots.
FANUC Certification – Robot Programmer Level 1.
Solidworks CSWA Certification.
🧪 Team Foundation
The M. T. A. promoted the formation of the team since the creation of the Transdisciplinary Laboratory in 2024. Subsequently, in August 2025, the integration of 14 students to develop projects in satellite control and mobile robotics, in collaboration with Dr. Jorge Hernández, marked the formal beginning of the space robotics team.
👉 Want to know more about what I do?
✨ Discover our projects here: Research and Work Lines


👨💻 Introduction:
Dr. J.J. Hernández-Gómez obtained his degree in Physics and his Master's in Physical Sciences from the National Autonomous University of Mexico (UNAM). He earned his Doctorate in Sciences from the IMP. In 2010, he was appointed as a part-time professor at the Faculty of Sciences of UNAM, and in 2013, he became a full-time professor at the Aerospace Development Center (CDA) of the National Polytechnic Institute (IPN) in Mexico. He has been a tenured full-time professor at CDA/IPN since 2020. He has presented his research results at over 132 national and international conferences and has published 55 peer-reviewed indexed research articles. He has led 19 research projects and has participated in more than 40, all successfully completed. He has advised numerous undergraduate and graduate theses.
🤖 Experience:
Modeling of mechanical systems.
Electrodynamic systems.
Numerical analysis.
Nonlinear dynamic systems.
👉 Want to know more about what I do?
✨ Discover our projects here: Research and Work Lines
🛠️ Projects and Work We Offer
🛰️ Satellite Control Robotics
Robotic systems for satellite simulation and control.
Precision actuators for gyroscopes and reaction wheels.
HIL (Hardware in the Loop) validation of control algorithms.


🤖 Mobile Robotics and Exploration
Development of autonomous and semi-autonomous mobile robots.
Exploration rovers capable of navigating complex terrain.
Integration of robotic arms and grippers for object interaction.
Mobility testing on surfaces similar to the Moon or Mars.




Workshops and programs for students and collaborators.
Design and construction of robotic prototypes.
Programming of industrial robots (ABB, KUKA, FANUC).
Thesis, internship, and final project advising.
🎓 Educational and Collaborative Projects
🎛️ Applied Control Theory


Design and implementation of controllers in robotic systems.
Development of ADRC controllers for advanced robotics.
Simulation and testing of control strategies in real and virtual environments.
Application of classical and modern control in mobile robots, manipulators, and satellite systems.
Active Members
Cristopher Hernández Soto
Ingeniería en Robótica Industrial, ESIME Azcapotzalco, IPN
José Rodrigo Ibarra Santillán
Ingeniería Mecatrónica, UPIITA, IPN
Carlos Enrique Mejía López
Ingeniería Mecatrónica, UPIITA, IPN
Julio David Torres García
Ingeniería Mecatrónica, UPIITA, IPN
Cesar Armando Herrera López
Ingeniería Mecatrónica, UPIITA, IPN
Abigail Olvera Alvarado
Ingeniería Mecatrónica, UPIITA, IPN
Britany Naomi Avilés Pinto
Ingeniería Mecatrónica, UPIITA, IPN
Fernando Valle Perez
Ingeniería Mecatrónica, UPIITA, IPN
Jesús Daniel Ávila Gutiérrez
Ingeniería Mecatrónica, UPIITA, IPN
Dafne Govea Quintana
Ingeniería en Robótica Industrial, ESIME Azcapotzalco, IPN
Josué Ruíz Vargas
Maestría en Tecnologías Avanzadas, UPIITA, IPN
Leonardo Hernández Carbajal
Ingeniería Mecatrónica, UPIITA, IPN
Rogelio Lara Olvera
Ingeniería Mecatrónica, UPIITA, IPN
Mauricio Ramírez Luna
Ingeniería Mecatrónica, UPIITA, IPN
Alin Michel Zárate Cuapío
Doctorado en Ingeniería de Sistemas Robóticos y Mecatrónicos
UPIITA, IPN
Kevin Missael Espinoza Solis
Ingeniería Mecatrónica, UPIITA, IPN